
Projects
Implementation of PPO for Multi-Agent Path Finding with Dynamic Obstacles
Multi-agent path finding (MAPF) addresses the challenge of enabling multiple agents to reach individual goals without collisions in shared, confined environments, such as automated warehouses. This project proposes a reinforcement learning–based decentralized policy for MAPF using a synchronized Proximal Policy Optimization (PPO) framework. By synchronizing agent weights within the same environment and leveraging the PPO objective, the method improves training stability and mitigates the data inefficiency observed in the baseline MAPPER approach. Experimental results demonstrate improved performance in terms of average reward, collision rate, and success rate compared to the baseline.
Georgia Institute of Technology · CS 8803 RLR — Research Project
Autonomous competition robot built using Arduino Nano.
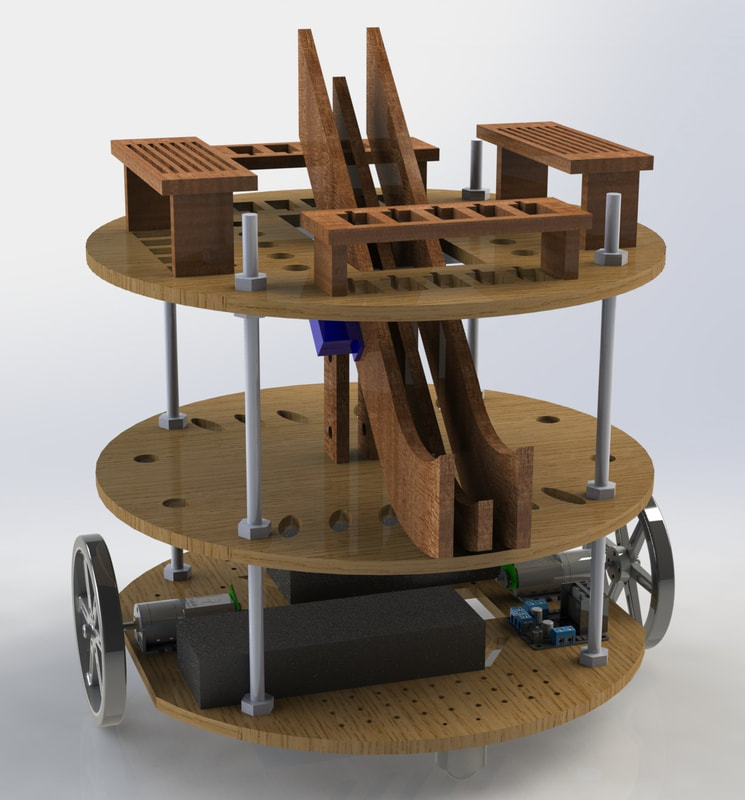
I co-designed and built an autonomous mobile robot for a mechatronics tournament, where the system was required to follow a prescribed path, interpret multiple beacon signals to infer game state, and autonomously deposit game objects into designated bins. The robot integrated onboard sensing, feedback control, and task-level logic to execute the full pipeline without human intervention.
Our team achieved second place overall in the competition.
Our team achieved second place overall in the competition.
Stanford University · ME 210 — Course Project
Application of a Genetic Algorithm to the Optimization of Walker Delta Constellations
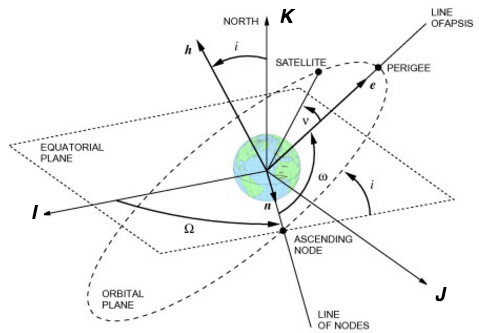
Developed a genetic algorithm–based framework to optimize Walker Delta satellite constellations, using Earth coverage as the fitness metric. The study demonstrates how constellation design parameters and orbital configurations influence coverage performance in distributed space systems.
Stanford University · AA 222 — Research Project
Head-Tracking for Virtual Reality Applications using EKF
Developed a real-time head-tracking system for VR using an Extended Kalman Filter (EKF) to estimate headset orientation with low latency. The system fuses inertial and magnetic sensor data and evaluates a compensated accelerometer-based approach to mitigate gyroscope drift. Simulation results demonstrate accurate orientation tracking suitable for real-time VR rendering pipelines.
Stanford University · AA 273 — Research Project
Optimal Irrigation on an Hourly Scale Using Model Predictive Control (MPC)
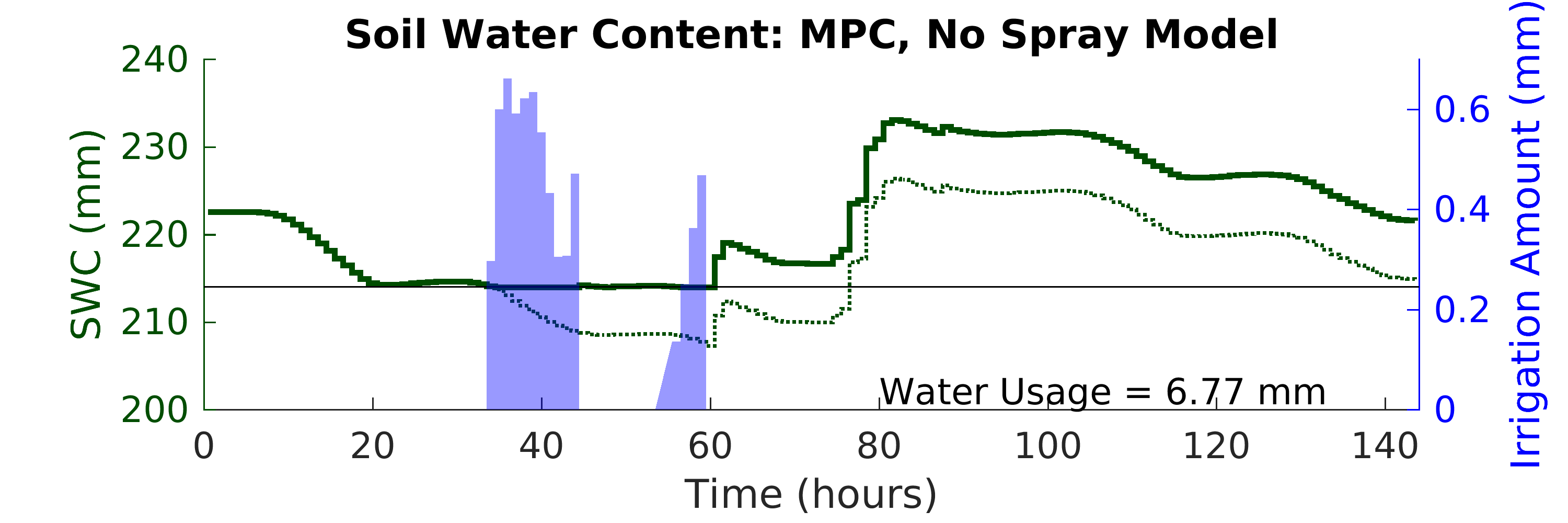
Developed an MPC-based irrigation controller using weather forecasts and FAO soil models, demonstrating reduced water usage through optimal hourly irrigation scheduling
Stanford University · AA 203 — Research Project
Semantic Segmentation in the Traffic Environment using the DeepLabv3+ Model
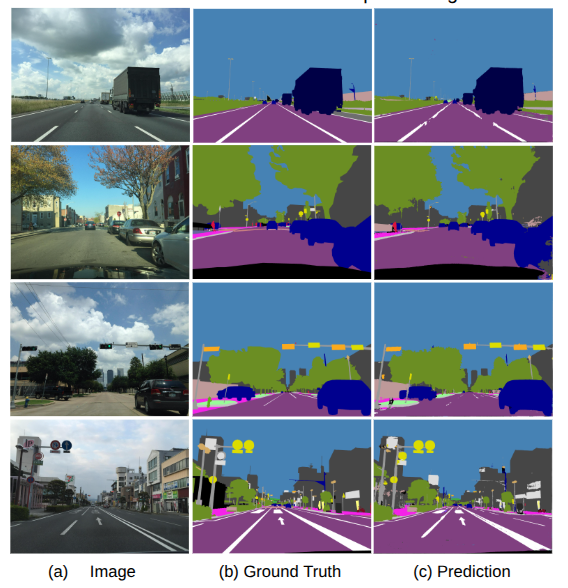
Semantic segmentation in the traffic environment is an important perception task for autonomous driving. This project performed semantic segmentation on the Mapillary Vistas Dataset, a novel street scene dataset containing 66 object categories. We conducted transfer learning based on the DeepLabv3+ developed by Google TensorFlow. The DeepLabv3+ model employs the spatial pyramid pooling module and the encode-decoder structure. Our fine-tuned model is able to score 23.6% mIoU on the test set of the Mapillary Vistas Dataset (being able to rank No.6 on the MVD Challenge Leaderboard as of Jun. 7, 2018).
Stanford University · CS 231N — Research Project
Implementation of Reinforcement Learning and Game Theory for Optimal Path Planning with Dynamic Obstacles
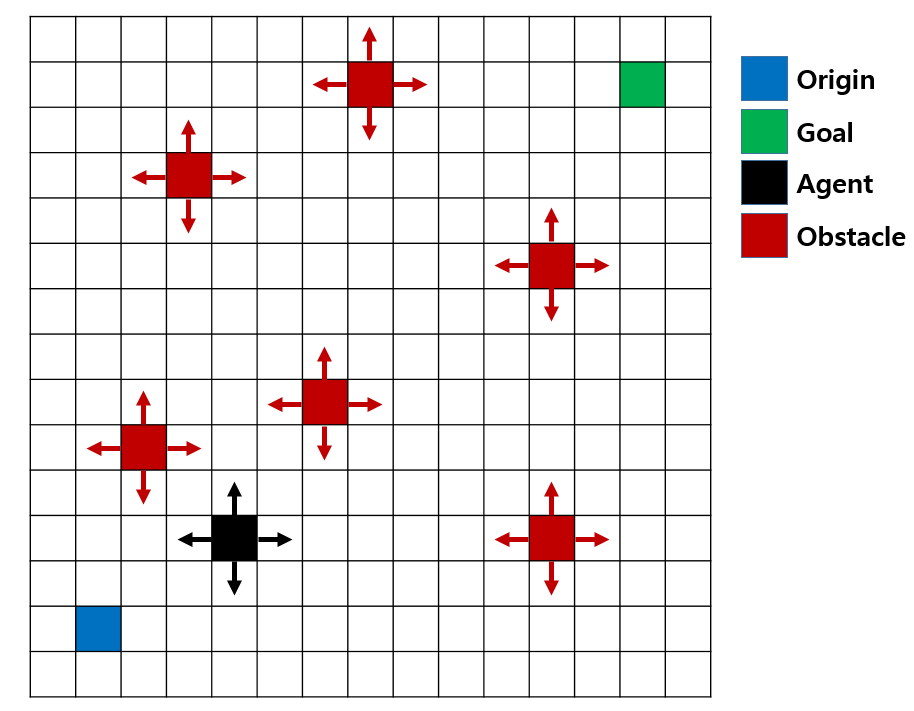
This project explores optimal path planning in dynamic environments by comparing heuristic search, game-theoretic methods, and reinforcement learning. A grid-based navigation problem with moving obstacles is formulated, where the agent must reach a goal while avoiding collisions and minimizing cost. Simulation results show that while modified A* and game-theoretic approaches involve trade-offs between optimality and computation, a Q-learning–based policy achieves near-oracle performance, delivering high success rates and low evaluation time even in complex, dynamic scenarios.
Stanford University · CS 221 — Research Project
Conceptual Design and Optimization of a Long-Range Aircraft
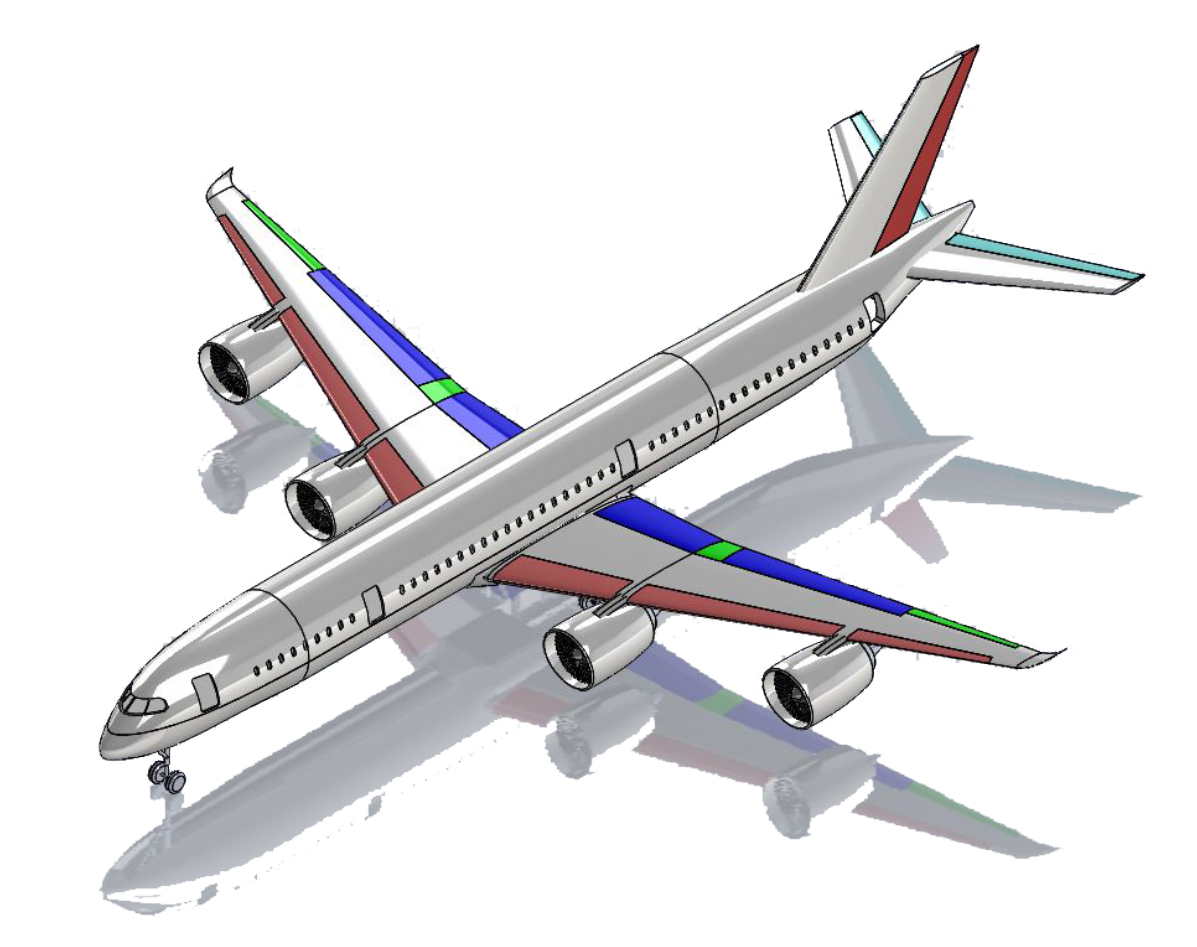
The objective of this senior undergraduate project, as documented in the Critical Design Report (CDR) by Airbenders Ltd., was to provide the conceptual design and optimization of a long-range aircraft for Singapore Airlines. Specifically, the aircraft was to carry 125 business-class passengers on a nonstop route from Newark to Singapore (8,285 nautical miles plus 200 nautical miles of reserves) with a target market entry in 2025. The central design goal was to minimize the Cash Operating Cost (COC) to ensure profitability, while adhering to Federal Aviation Regulations (FAR Part 25). The team developed and utilized Multidisciplinary Design Optimization (MDO) software to achieve a design with the minimum COC, and through this optimization, a four-engine configuration was selected for its lower COC of $423,013, primarily due to the lower thrust-specific fuel consumption (TSFC) of the GEnx engine. The final design, which includes an interior layout optimized for passenger comfort with a 2-2-2 offset seating arrangement for full lie-flat seats and direct aisle access, features an optimized wing geometry (353.03 m² reference area, 57.3 m span, 23.7° sweep) that achieves a cruise Lift-to-Drag (L/D) ratio of 16.7, meeting all mission specifications.
University of Michigan · AE 481 — Course Project